
















회전식 태블릿 프레스가 광고된 속도에 도달하지 못하는 경우, 단일 결함이 있는 경우는 거의 없습니다. 명판 속도는 이상적인 입자, 작은 정제, 충분한 체류 시간, 완벽한 툴링, 깨끗하고 잘 조정된 라인을 가정합니다. 실제 생산에서는 작은 편차가 복합적으로 작용하여 속도에 한계가 발생합니다. 아래는 엔지니어링 주도의 실용적인 근본 원인 분석, 신속한 진단 방법 및 GZPK-51이 이를 해결하는 방법입니다.
명판 속도가 가정하는 것
- 자유 유동 과립(낮은 응집력, 최소한의 미세 입자, 안정적인 벌크 밀도)
- 높은 RPM에서 빠르고 일관된 다이 충진
- 과압 없이 목표 경도를 달성하기 위한 적절한 체류 시간
- 마모를 최소화하고 완벽한 정렬을 보장하는 엄격한 툴링 공차
- 원활한 업스트림 피딩 및 다운스트림 역압 최소화
- 안정적인 환경(습도, 온도)과 깨끗하고 끈적임 없는 제형
프레스가 사양 미만으로 작동하는 12가지 엔지니어링 이유
- 과립 유동성이 미미함
- 유량 부족, 높은 미세도 또는 습도가 높으면 높은 RPM에서 다이 충전이 느리거나 고르지 않아서 무게 변화를 제어하기 위해 속도를 줄여야 합니다.

- 다이 채우기 시간이 충분하지 않습니다.
- 더 큰 충전 깊이, 저밀도 분말 또는 높은 패들 제한은 피더 아래에서 더 많은 체류 시간을 필요로 하며 속도가 떨어져야 합니다.
- 체류 시간 대 경도의 충돌
- 어려운 활성제나 고부하 공식의 경도 목표에는 더 긴 체류 시간이 필요하므로 압력을 한계 이하로 유지하여 터렛 속도를 늦춥니다.
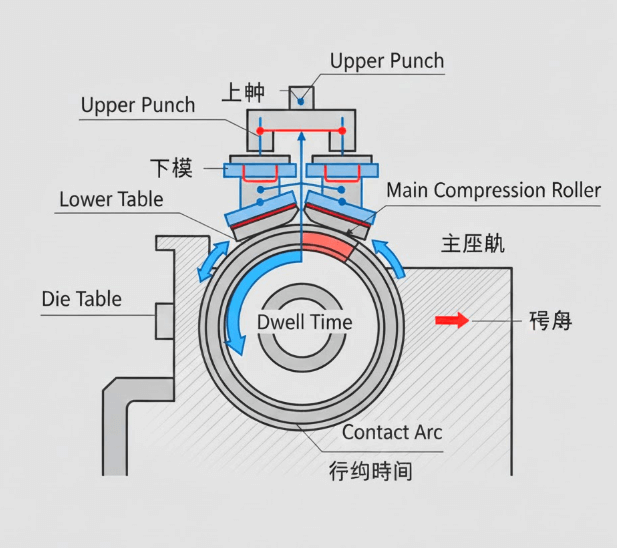
- 사전 압축 및 메인 압축 불균형
- 사전 압축 전환이 제대로 이루어지지 않으면 높은 RPM에서 캡핑 또는 라미네이션이 발생하고, 작업자는 거부 한도 내에 머물기 위해 속도를 늦춥니다.
- 체중 조절 피드백 지연
- 느린 피드백 필터링이 적용된 공격적인 속도는 무게 진동을 유발하며, 제어 루프는 낮은 RPM에서만 안정화됩니다.
- 툴링 마모 또는 공차 드리프트
- 마모된 펀치/다이(또는 사양을 벗어난 보어)는 마찰, 열, 고착 위험을 증가시키며, 속도 감소는 손상과 스크랩을 방지합니다.
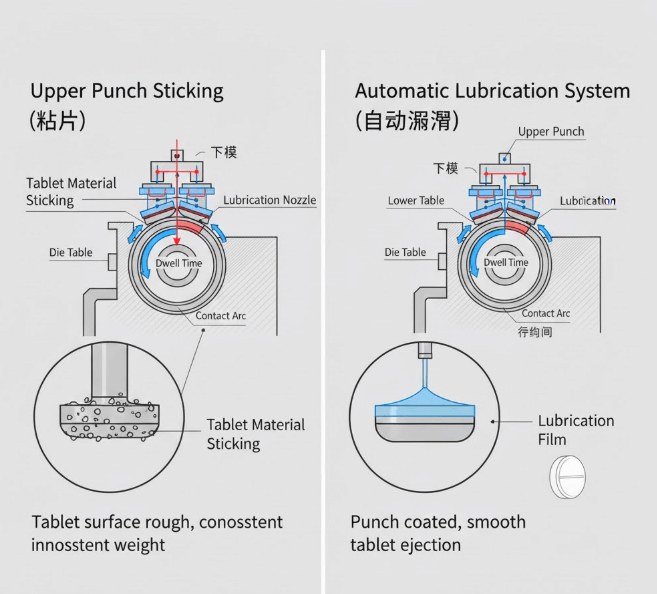
- 달라붙음, 따가움 및 부적절한 윤활 상태
- 접착 활성제나 저윤활 혼합물은 빠른 속도로 달라붙기 때문에 최적화된 윤활이 없으면 가동 중단을 피하기 위해 속도를 낮춰야 합니다.
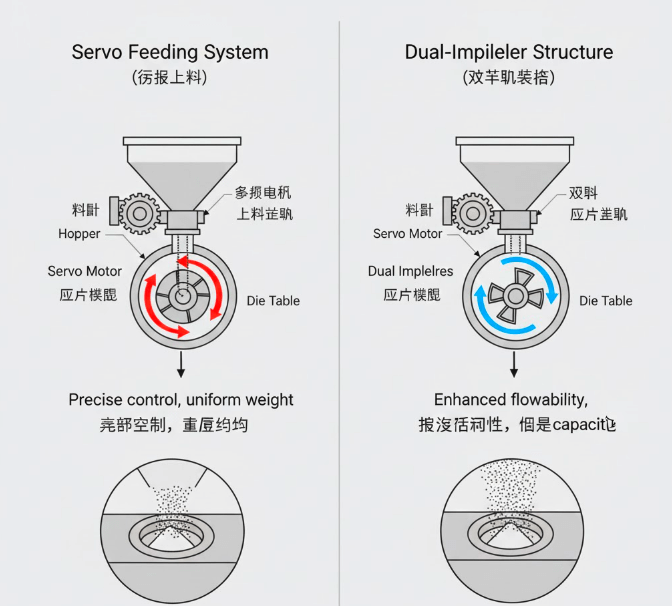
- 피더 튜닝 및 호퍼 고갈
- 서보 피더 속도/패들 각도가 잘못되거나 블렌드가 분리되면 일시적으로 언더필이 발생하고, 중량 CV를 사양에 맞추기 위해 속도가 떨어집니다.
- 터렛 밸런스 및 기계적 상태
- 압축 롤러의 정렬 불량, 베어링 마모 또는 진동은 경보와 변동성을 유발하며, 속도를 늦추면 기계적 문제가 가려집니다.
- 회선 통합 역압
- 먼지 제거기, 금속 탐지기 또는 진공 추출은 저항을 가하며, 정제 배출이 고속으로 차단되어 RPM을 강제로 낮춥니다.
- OPC/PLC 안전 및 품질 제한
- 원격 모니터링 임계값 또는 토크/압력 캡은 오버슈트를 방지하고, 한계에 도달하면 시스템에서 속도를 조절합니다.
- 환경 변동성
- 수분 급증, 온도 변화 또는 정전기가 흐름/압축을 변화시키면 속도가 최악의 조건을 따라야 합니다.
빠른 진단 체크리스트(언론을 탓하기 전에 실행하기)
- 유동성: 휴식 각도, 카 지수, 깔때기 유량을 측정하고, 미세 먼지를 차단하고 습도를 제어합니다.
- 벌크 밀도 및 채우기 깊이: 속도에서 목표 충전량을 확인하고 피더 패들 각도와 간격을 조정합니다.
- 드웰 압력 맵: 경도 대 RPM 대 메인/프리압축 설정을 기록하여 실제 드웰 제약 조건을 찾습니다.
- 툴링 감사: 펀치 헤드 및 팁 마모, 다이 보어 진원도, 정렬 상태를 점검하고 공차를 벗어난 세트를 교체합니다.
- 윤활: 윤활 수준, 분포 및 자동 윤활 주기를 확인하고 끈적이는 API를 위한 펀치 팁 코팅을 고려합니다.
- 피드백 튜닝: 무게 제어 필터와 샘플링 창을 최적화하여 더 높은 RPM에서 안정화합니다.
- 기계적 상태: 롤러, 베어링, 터렛 런아웃, 진동을 검사하고 속도 시험 전에 수정합니다.
- 라인 초크 포인트: 목표 처리량에서 먼지 제거기/금속 검출기 용량을 검증하고 진공 및 배출 각도를 조정합니다.
- OPC 제한: 제어 시스템의 알람 임계값, 토크/압력 상한, 속도 상한을 검토하세요.
GZPK-51이 이러한 제약을 해결하는 방법
- 이중 압축 롤러: 더 높은 RPM에서 더 많은 가용 체류 시간을 확보하여 압력 상한을 초과하지 않고 경도를 달성합니다.
- 서보 공급: 패들 속도와 각도를 정밀하게 조정하여 일관된 다이 충진 및 속도에서 더 가벼운 CV를 제공합니다.
- 높은 툴링 정밀도: 동심도가 높아지면 마찰과 열이 감소하여 안정적인 고속 압축이 가능합니다.
- 자동 윤활: 펀치/다이에 일관된 필름이 부착되어 높은 처리량에서 고착/피킹 및 열 상승을 줄입니다.
- 달라붙지 않는 디자인: 표면 마감과 공기 흐름 관리로 접착력을 줄여 예기치 않은 중단을 줄입니다.
- OPC 원격 모니터링: 실시간 토크/압력/중량 대시보드를 통해 변동성이 커지기 전에 설정을 조정할 수 있습니다.
- 통합 성능: 배출 병목 현상을 방지하기 위해 고용량 먼지 제거기와 감지기에 맞게 설계되었습니다.
속도와 압박감을 모두 충족할 수 있을까요?
- 예-정의된 제품 창 내에서. 당사는 고객의 과립을 사용하여 목표 경도, 두께 및 중량 CV로 속도를 검증합니다. 듀얼 롤러 설계와 서보 이송을 통해 경도를 유지하면서 더 높은 RPM에서 다이 충진 품질을 유지할 수 있습니다.
FAT/SAT를 통과할 수 있나요?
- 속도, 중량 CV, 경도 및 불합격률에 대한 허용 한도를 설정하여 지정된 공식 또는 검증된 대리물을 사용하여 FAT를 실행합니다. SAT는 현장에서 유틸리티 및 라인 장비로 프로토콜을 반복하여 규모에 맞는 처리량을 확인합니다.
툴링 수명 및 호환성
- 적절한 윤활, 정렬 및 경도 타겟팅을 통해 툴링 수명이 업계 표준을 충족합니다. 접착성 API를 위한 권장 코팅과 펀치 팁을 고속으로 보호하기 위한 공차 맵을 제공합니다.
과립과 함께 작동하나요?
- 흐름, 밀도, 압축성 지수, 수분을 평가합니다. 과립이 미미한 경우 구형화, 건식 과립 조정, 벌금 감소 또는 윤활 전략 변경을 통해 GMP 제한을 희생하지 않고 속도를 높일 수 있도록 조언합니다.
시장 현실: 속도가 전부는 아닙니다
- GMP 조사가 강화되면서 원시 RPM보다 안정성과 일관성이 더 중요해졌습니다. OPC를 통한 데이터 추적, 중량 CV 제어, 자동 윤활은 가동 중단 시간과 배치 위험을 줄여주며, 명판 속도만 쫓는 것보다 더 높은 순 처리량을 제공하는 경우가 많습니다.
속도 격차 해소를 위한 실행 계획
- 진단 체크리스트를 실행하고 증분 RPM 단계에서 데이터를 캡처하세요.
- 서보 피더 및 프리/메인 압축 밸런스 조정, OPC 제한 업데이트.
- 마모된 툴링을 교체하고 윤활 주기를 확인합니다.
- 다운스트림 용량(먼지 제거기, 검출기, 진공)을 목표 처리량에 맞게 조정하세요.
- 과립 흐름이 경계선인 경우 제형 또는 과립을 조정하여 채움 및 다짐 동작을 개선합니다.